航芯ACM32G103开发板 ADC Timer外设测试
08-航芯ACM32G103开发板评测 ADC Timer芯片外设测试
1. 软硬件平台
- ACM32G103 Board开发板
- MDK-ARM Keil
2. 定时器Timer
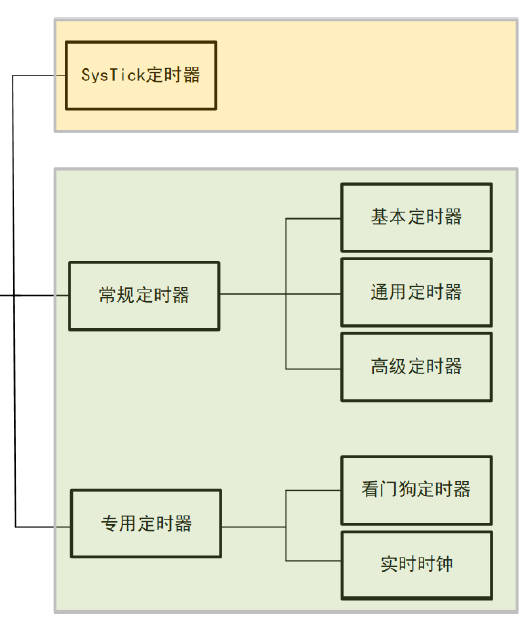
在一般的MCU芯片中,定时器这个外设资源是非常重要的,一般可以分为SysTick定时器(系统滴答定时器)、常规定时器(基本定时器,通用定时器,高级定时器)、专用定时器(看门狗定时器,RTC)
 在ACM32G103中有着丰富的定时器资源,还包括低功耗定时器lptimer,具体资源如下
在ACM32G103中有着丰富的定时器资源,还包括低功耗定时器lptimer,具体资源如下
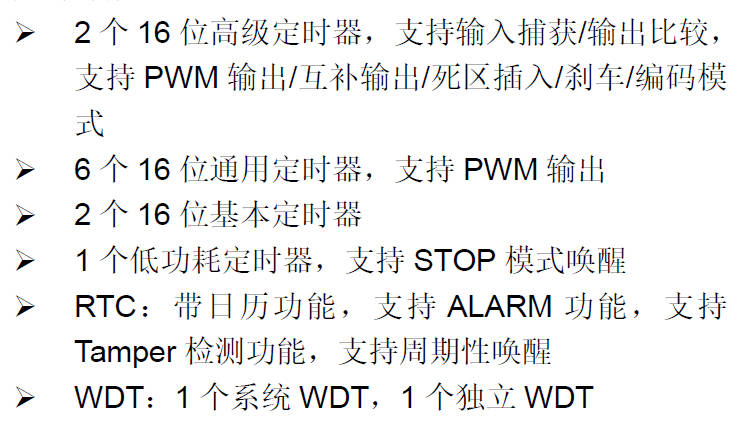 基础定时器最简单,就只是普通的计数、定时功能。通用定时器在基础定时器的功能上,增加了输入捕获和输出比较等功能。高级定时器在通用定时器的功能上,造假了包含测量输入信号的脉冲宽度(输入捕获),或者产生输出波形(输出比较、PWM、嵌入死区时间的互补PWM)的功能。
接下来进行基本的定时器定时功能测试。在官方给的SPL库里面只有两个例程,感觉有点少,与stm32相比较,许多的库函数没有完善。原本打算使用HC-SR04超声波模块进行定时器测试,但是发现有不少问题,而且定时精度比较高就放弃了,以后有时间再看看吧,或者看看其他人的东西。
基础定时器最简单,就只是普通的计数、定时功能。通用定时器在基础定时器的功能上,增加了输入捕获和输出比较等功能。高级定时器在通用定时器的功能上,造假了包含测量输入信号的脉冲宽度(输入捕获),或者产生输出波形(输出比较、PWM、嵌入死区时间的互补PWM)的功能。
接下来进行基本的定时器定时功能测试。在官方给的SPL库里面只有两个例程,感觉有点少,与stm32相比较,许多的库函数没有完善。原本打算使用HC-SR04超声波模块进行定时器测试,但是发现有不少问题,而且定时精度比较高就放弃了,以后有时间再看看吧,或者看看其他人的东西。
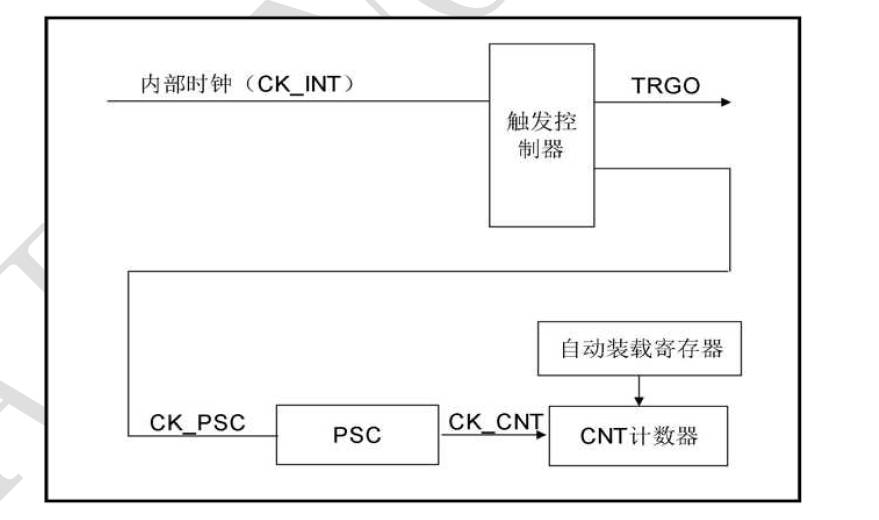
 基本定时器包含一个16 位自动装载计数器,由各自的可编程预分频器驱动。
基本定时器包含一个16 位自动装载计数器,由各自的可编程预分频器驱动。
//嵌套向量中断控制器配置
void NVIC_Configuration(void)
{
NVIC_ClearPendingIRQ(TIM6_IRQn);
NVIC_EnableIRQ(TIM6_IRQn);
}
//时钟配置使能
void Clock_Configuration(void)
{
__RCC_TIM6_CLK_ENABLE();
}
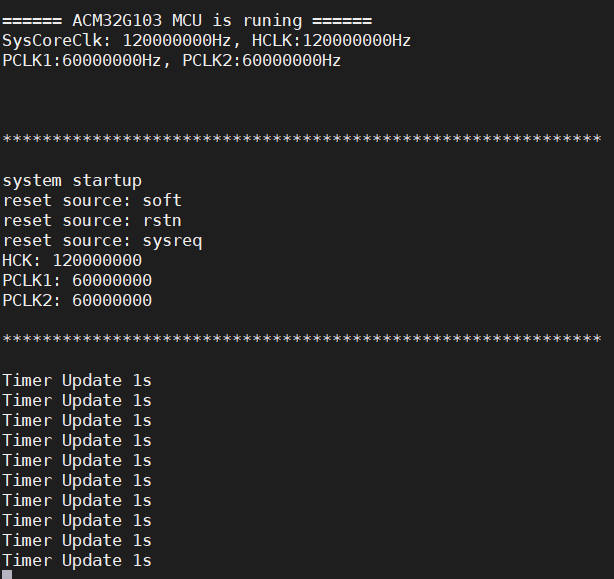
定时器配置函数 定时器的定时时间主要取决于预分频系数和定时周期。重要的参数Prescaler,Period 如果需要修改定时器定时时间,只需要修改 TIM_TimeBaseStructure.Period = (TIM_CLOCK_FREQ/1000)500 - 1; // 500ms 修改为 TIM_TimeBaseStructure.Period = (TIM_CLOCK_FREQ/1000)1000 - 1; // 1000ms=1s
void TIM6_Init(void)
{
uint32_t timer_clock;
timer_clock = RCC_GetPCLK1Freq();
if (RCC_GetHCLKFreq() != timer_clock) // if hclk/pclk != 1, then timer clk = pclk * 2
{
timer_clock = timer_clock << 1;
}
TIM_TimeBaseStructure.ClockDivision = TIM_CLOCKDIVISION_DIV1;
TIM_TimeBaseStructure.CounterMode = TIM_COUNTERMODE_UP;
TIM_TimeBaseStructure.RepetitionCounter = 0;
TIM_TimeBaseStructure.Prescaler = (timer_clock/TIM_CLOCK_FREQ) - 1;
TIM_TimeBaseStructure.Period = (TIM_CLOCK_FREQ/1000)*500 - 1; // 500ms
TIM_TimeBase_Init(TIM6, &TIM_TimeBaseStructure);
/* TIM IT enable */
TIM_ITConfig(TIM6, TIM_IT_Update, ENABLE);
/* TIM6 enable counter */
TIM_Cmd(TIM6, ENABLE);
}
3.模数转换器ADC
1. ADC简介
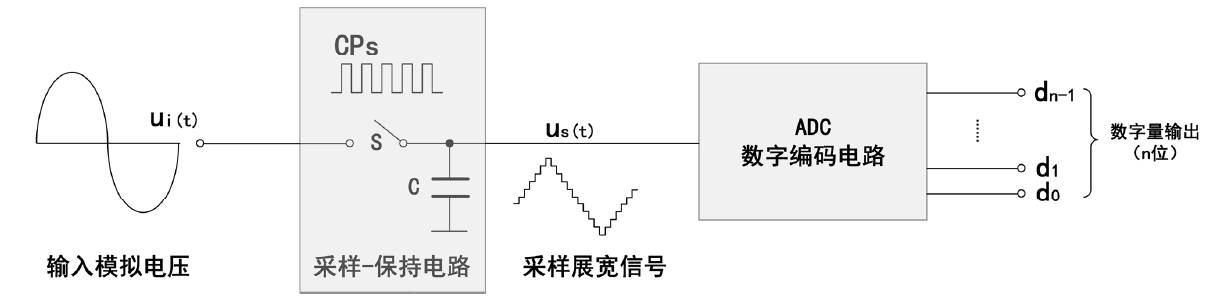
将模拟信号(连续信号)转换为数字信号(离散信号)的器件就叫模数转换器(ADC)。
按原理可分为:并行比较型A/D转换器(FLASH ADC)、逐次比较型A/D转换器(SAR ADC)和双积分式A/D转换器(Double Integral ADC)。
A/D转换过程通常为4步:采样、保持、量化和编码。如图所示。
 ADC的主要有三个性能指标:分辨率、转换时间和转换精度。
ADC的主要有三个性能指标:分辨率、转换时间和转换精度。
1.1 分辨率
分辨率:又称为转换精度,指ADC能分辨的最小电压,通常使用二进制有效位表示,反应了ADC对输入模拟量微小变化的分辨能力。当最大输入电压一定时,位数越多,量化单位越小,误差越小,分辨率越高。比如一个12位的ADC,参考电压为3.3V,则其能分辨的最小电压为:

1.2 转换时间
转换时间:其倒数为转换速率,指ADC从控制信号到来开始,到输出端得到稳定的数字信号所经历的时间。转换时间通常与ADC类型有关,双积分型ADC的转换时间一般为几十毫秒,属于低速ADC;逐次逼近型ADC的转换时间一般为几十微妙,属于中速ADC;并联比较型ADC的转换时间一般为几十纳秒,属于高速ADC。
1.3 转换精度
转换精度:指ADC输出的数字量所表示的模拟值与实际输入的模拟量之间的偏差,通常为1个或半个最小数字量的模拟变化量,表示为1LSB或1/2LSB。
2.ACM32G103 ADC资源
ACM32G103芯片有2个12位逐次逼近型ADC。ADC1与ADC2紧密耦合,可在双重模式下运行(ADC1 为主器件,ADC2为从器件)。
- 12 位分辨率,可配置10 位、8 位或6 位分辨率
- 转换速率最高可达3Msps
- 20 个可用通道,包括外部信号源和内部信号源
3. ADC初始化配置
首先需要定义需要使用的ADC 通道数量,以及具体的ADC 通道号。确定需要使用到的工作模式(独立模式、双ADC 模式、单端、差分或者是否支持DMA 等),设置ADC CLK,根据需求进行初始化配置。 ADC采集方式有下面四种:轮询方式,中断方式,外部触发方式,DMA 方式。 以DMA为案例进行处理。 ADC_DMA驱动函数
void ADC_DMA_Drive_Iint(void)
{
ADC_GPIO_Config();//ADC_GPIO端口引脚初始化配置
ADC_Common_Register_Config();//ADC通用寄存器配置
ADC_Config();//ADC工作模式配置
ADC_DMA_Config();//ADC_DMA请求配置
ADC_RegularStart();//使能ADC,开始常规通道的转换
}
ADC_GPIO端口引脚初始化配置
void ADC_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
__RCC_GPIOC_CLK_ENABLE();
/* Configure ADC Channel_13 pin as analog input */
GPIO_InitStruct.Pin = GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_Init(GPIOC, &GPIO_InitStruct);
}
ADC通用寄存器配置
void ADC_Common_Register_Config(void)
{
ADC_CommonInitTypeDef ADC_CommonInitStructure;
ADC_CommonInitStructure.ADC_Mode = ADC_MODE_INDEPENDENT;//双ADC模式选择
ADC_CommonInitStructure.ADC_Prescaler = ADC_CLOCK_DIV4;//ADC_CLK分频选择
ADC_CommonInitStructure.ADC_DMAAccessMode = ADC_DMAACCESSMODE_DISABLED;//双ADC下DMA功能选择
ADC_CommonInitStructure.ADC_TwoSamplingDelay = ADC_TWOSAMPLINGDELAY_5CYCLES;//2个采样阶段之间的延迟
ADC_CommonInit(&ADC_CommonInitStructure);
}
ADC工作模式配置
void ADC_Config(void)
{
ADC_InitTypeDef ADC_InitStructure;
ADC_InitStructure.ADC_Resolution = ADC_RESOLUTION_12B;//分辨率
ADC_InitStructure.ADC_ContinuousConvMode = ADC_CONT_DISABLE;//连续转换模式
ADC_InitStructure.ADC_ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;//外部触发边沿选择
ADC_InitStructure.ADC_ExternalTrigConv = ADC_EXTERNAL_TIG0;//触发模式
ADC_InitStructure.ADC_DataAlign = ADC_DATAALIGN_RIGHT;//数据对齐
ADC_InitStructure.ADC_NbrOfConversion = ADC_NUM;//规则通道序列长度 传输的数据长度为:每个通道采集30次 * 1个通道
ADC_Init(ADCX, &ADC_InitStructure);
//规则通道设置
ADC_RegularChannelConfig(ADCX, ADC_CHANNEL_13, ADC_SEQUENCE_SQ1, ADC_SMP_CLOCK_320);
}
ADC_DMA请求配置
void ADC_DMA_Config(void)
{
__RCC_DMA1_CLK_ENABLE();
DMA_BigEndianConfig(DMA1, DISABLE);
DMA_DeInit(DMA1_Channel3);
DMA_InitStruct.Mode = DMA_MODE_CIRCULAR;
DMA_InitStruct.DataFlow = DMA_DATAFLOW_P2M;
DMA_InitStruct.ReqID = DMA1_REQ0_ADC1;
DMA_InitStruct.RawInt = DMA_RAWINT_ENABLE;
DMA_InitStruct.SrcInc = DMA_SRCINC_DISABLE;
DMA_InitStruct.DestInc = DMA_DESTINC_ENABLE;
DMA_InitStruct.SrcWidth = DMA_SRCWIDTH_WORD;
DMA_InitStruct.DestWidth = DMA_DESTWIDTH_WORD;
DMA_InitStruct.SrcBurst = DMA_SRCBURST_1;
DMA_InitStruct.DestBurst = DMA_DESTBURST_1;
DMA_InitStruct.SrcAddr = (uint32_t)&ADC1->DR;
DMA_InitStruct.DestAddr = (uint32_t)gadcBuffer;
DMA_InitStruct.Size = 1;
DMA_Init(DMA1_Channel3, &DMA_InitStruct);
// Enable interrupt
DMA_ClearFlag(DMA1_Channel3, DMA_FLAG_RTC);
DMA_ITConfig(DMA1_Channel3, DMA_IT_TC, ENABLE);
// Enable NVIC IRQ
NVIC_ClearPendingIRQ(DMA1_IRQn);
NVIC_SetPriority(DMA1_IRQn, 0x00);
NVIC_EnableIRQ(DMA1_IRQn);
DMA_Cmd(DMA1_Channel3, ENABLE);
}
使能ADC,开始常规通道的转换
void ADC_RegularStart(void)
{
/* Enable ADC DMA mode */
ADC_DMACmd(ADCX, ENABLE);
/* Enable the ADC peripheral */
ADC_Cmd(ADCX, ENABLE);
/* Clear the SR register */
ADC_ClearFlag(ADCX, ADC_IT_FLAG_ALL);
/* Start conversion */
ADC_SoftwareStartConv(ADCX);
}
中断服务函数
void DMA1_IRQHandler(void)
{
ADC_DMA_ITC_Callback();
}
void ADC_DMA_ITC_Callback(void)
{
/* Transfer complete interrupt */
if (SET == DMA_GetFlagStatus(DMA1_Channel3, DMA_FLAG_TC))
{
gadc1ItcConunt = 1;
DMA_ClearFlag(DMA1_Channel3, DMA_FLAG_TC);
}
}
4.测试
- Timer测试函数
#define TIM_CLOCK_FREQ (10000)
TIM_Base_InitTypeDef TIM_TimeBaseStructure;
volatile uint32_t Timer_Update_Flag;
void Clock_Configuration(void);
void GPIO_Configuration(void);
void NVIC_Configuration(void);
void NVIC_Configuration(void)
{
NVIC_ClearPendingIRQ(TIM6_IRQn);
NVIC_EnableIRQ(TIM6_IRQn);
}
void Clock_Configuration(void)
{
__RCC_TIM6_CLK_ENABLE();
}
void GPIO_Configuration(void)
{
// do nothing here
}
/************************************************************************
* function : TIM6_Update_IRQ
* Description: TIM6 user Interrupt Handler
************************************************************************/
void TIM6_Update_IRQ(void)
{
if (TIM6->SR & TIMER_SR_UIF)
{
Timer_Update_Flag = 1;
}
}
void TIM6_Init(void)
{
uint32_t timer_clock;
timer_clock = RCC_GetPCLK1Freq();
if (RCC_GetHCLKFreq() != timer_clock) // if hclk/pclk != 1, then timer clk = pclk * 2
{
timer_clock = timer_clock << 1;
}
TIM_TimeBaseStructure.ClockDivision = TIM_CLOCKDIVISION_DIV1;
TIM_TimeBaseStructure.CounterMode = TIM_COUNTERMODE_UP;
TIM_TimeBaseStructure.RepetitionCounter = 0;
TIM_TimeBaseStructure.Prescaler = (timer_clock/TIM_CLOCK_FREQ) - 1;
TIM_TimeBaseStructure.Period = (TIM_CLOCK_FREQ/1000)*500 - 1; // 500ms
TIM_TimeBase_Init(TIM6, &TIM_TimeBaseStructure);
/* TIM IT enable */
TIM_ITConfig(TIM6, TIM_IT_Update, ENABLE);
/* TIM6 enable counter */
TIM_Cmd(TIM6, ENABLE);
}
void Timer_Update_Test(void)
{
/* Module Clocks Configuration */
Clock_Configuration();
/* NVIC Configuration */
NVIC_Configuration();
Timer_Update_Flag = 0;
TIM6_Init();
while(1)
{
if(Timer_Update_Flag)
{
printfS("Timer Update Occurs\n");
Timer_Update_Flag = 0;
}
}
}
- ADC_DMA测试函数
//采样通道数
#define ADC_NUM (1)
uint32_t gadcBuffer[ADC_NUM];
static volatile uint32_t gadc1ItcConunt = 0;
#define ADCX (ADC1)
DMA_InitTypeDef DMA_InitStruct;//需配置为全局变量,不然DMA只会触发一次
/******************************************************************************
* @brief : DMA adc to memory transfer complete interrupt Callback.
* @param : None
* @return: None
******************************************************************************/
void ADC_DMA_ITC_Callback(void)
{
/* Transfer complete interrupt */
if (SET == DMA_GetFlagStatus(DMA1_Channel3, DMA_FLAG_TC))
{
gadc1ItcConunt = 1;
DMA_ClearFlag(DMA1_Channel3, DMA_FLAG_TC);
}
}
/******************************************************************************
* @brief : ADC GPIO config.
* @param : None
* @return: None
******************************************************************************/
void ADC_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
__RCC_GPIOC_CLK_ENABLE();
/* Configure ADC Channel_13 pin as analog input */
GPIO_InitStruct.Pin = GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_Init(GPIOC, &GPIO_InitStruct);
}
/******************************************************************************
* @brief : ADC Common register config.
* @param : None
* @return: None
******************************************************************************/
void ADC_Common_Register_Config(void)
{
ADC_CommonInitTypeDef ADC_CommonInitStructure;
ADC_CommonInitStructure.ADC_Mode = ADC_MODE_INDEPENDENT;//双ADC模式选择
ADC_CommonInitStructure.ADC_Prescaler = ADC_CLOCK_DIV4;//ADC_CLK分频选择
ADC_CommonInitStructure.ADC_DMAAccessMode = ADC_DMAACCESSMODE_DISABLED;//双ADC下DMA功能选择
ADC_CommonInitStructure.ADC_TwoSamplingDelay = ADC_TWOSAMPLINGDELAY_5CYCLES;//2个采样阶段之间的延迟
ADC_CommonInit(&ADC_CommonInitStructure);
}
/******************************************************************************
* @brief : ADC config.
* @param : None
* @return: None
******************************************************************************/
void ADC_Config(void)
{
ADC_InitTypeDef ADC_InitStructure;
ADC_InitStructure.ADC_Resolution = ADC_RESOLUTION_12B;//分辨率
ADC_InitStructure.ADC_ContinuousConvMode = ADC_CONT_DISABLE;//连续转换模式
ADC_InitStructure.ADC_ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;//外部触发边沿选择
ADC_InitStructure.ADC_ExternalTrigConv = ADC_EXTERNAL_TIG0;//触发模式
ADC_InitStructure.ADC_DataAlign = ADC_DATAALIGN_RIGHT;//数据对齐
ADC_InitStructure.ADC_NbrOfConversion = ADC_NUM;//规则通道序列长度 传输的数据长度为:每个通道采集30次 * 1个通道
ADC_Init(ADCX, &ADC_InitStructure);
//规则通道设置
ADC_RegularChannelConfig(ADCX, ADC_CHANNEL_13, ADC_SEQUENCE_SQ1, ADC_SMP_CLOCK_320);
}
/******************************************************************************
* @brief : ADC DMA config.
* @param : None
* @return: None
******************************************************************************/
void ADC_DMA_Config(void)
{
__RCC_DMA1_CLK_ENABLE();
DMA_BigEndianConfig(DMA1, DISABLE);
DMA_DeInit(DMA1_Channel3);
DMA_InitStruct.Mode = DMA_MODE_CIRCULAR;
DMA_InitStruct.DataFlow = DMA_DATAFLOW_P2M;
DMA_InitStruct.ReqID = DMA1_REQ0_ADC1;
DMA_InitStruct.RawInt = DMA_RAWINT_ENABLE;
DMA_InitStruct.SrcInc = DMA_SRCINC_DISABLE;
DMA_InitStruct.DestInc = DMA_DESTINC_ENABLE;
DMA_InitStruct.SrcWidth = DMA_SRCWIDTH_WORD;
DMA_InitStruct.DestWidth = DMA_DESTWIDTH_WORD;
DMA_InitStruct.SrcBurst = DMA_SRCBURST_1;
DMA_InitStruct.DestBurst = DMA_DESTBURST_1;
DMA_InitStruct.SrcAddr = (uint32_t)&ADC1->DR;
DMA_InitStruct.DestAddr = (uint32_t)gadcBuffer;
DMA_InitStruct.Size = 1;
DMA_Init(DMA1_Channel3, &DMA_InitStruct);
// Enable interrupt
DMA_ClearFlag(DMA1_Channel3, DMA_FLAG_RTC);
DMA_ITConfig(DMA1_Channel3, DMA_IT_TC, ENABLE);
// Enable NVIC IRQ
NVIC_ClearPendingIRQ(DMA1_IRQn);
NVIC_SetPriority(DMA1_IRQn, 0x00);
NVIC_EnableIRQ(DMA1_IRQn);
DMA_Cmd(DMA1_Channel3, ENABLE);
}
/******************************************************************************
* @brief: Enable ADC, start conversion of regular channle
* @param: None
* @return: None
******************************************************************************/
void ADC_RegularStart(void)
{
/* Enable ADC DMA mode */
ADC_DMACmd(ADCX, ENABLE);
/* Enable the ADC peripheral */
ADC_Cmd(ADCX, ENABLE);
/* Clear the SR register */
ADC_ClearFlag(ADCX, ADC_IT_FLAG_ALL);
/* Start conversion */
ADC_SoftwareStartConv(ADCX);
}
void ADC_DMA_Drive_Iint(void)
{
ADC_GPIO_Config();
ADC_Common_Register_Config();
ADC_Config();
ADC_DMA_Config();
ADC_RegularStart();
}
/******************************************************************************
* @brief : ADC function test.
* @param : None
* @return: None
******************************************************************************/
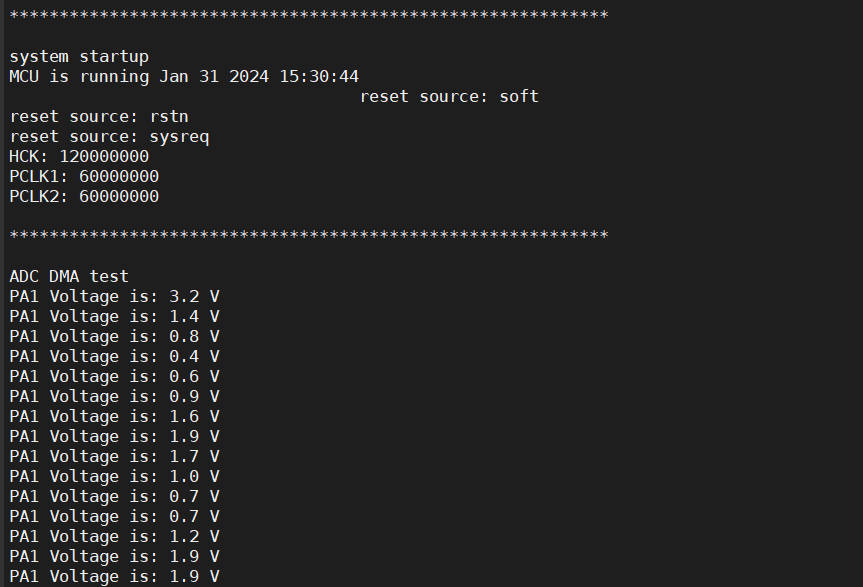
void APP_ADC_Test(void)
{
uint32_t i;
float vol=0.0;
printfS("ADC DMA test \r\n");
ADC_DMA_Drive_Iint();
while(1)
{
ADC_SoftwareStartConv(ADCX);
while(!gadc1ItcConunt);
gadc1ItcConunt =0;
for (i = 0; i < ADC_NUM; i++)
{
// printfS("Channel_%d = %d\r\n", ((gadcBuffer[i] >> 16) & 0xFF), (gadcBuffer[i] & 0xFFF));
vol = (gadcBuffer[i]&0xFFF)*3.3/4095;
printf("PA1 Voltage is: %0.1f V \r\n", vol);
}
DelayMs(1000);
}
}
测试结果